Hyundai Genesis (DH): Autonomous Emergency Braking(AEB) System / Description and Operation
| Description |
| 1. |
Sensing the vehicle driving ahead and data analysis with the
radar sensor of smart cruise control system (SCC) and camera sensor on
the Lane Keeping Assist System (LKAS) (CAN Communication) |
| 2. |
Checking the vehicle for AEB control with analyzed sensing data |
| 3. |
Calculation of proper speed reduction depending on the existence/speed/distance of the car ahead |
| 4. |
Transmitting the calculated "required speed reduction" to the Electronic Stability Control(ESC) (CAN Communication) |
| 5. |
ESC performs the braking control after calculating the
required torque for realizing the "required speed reduction" (CAN
Communication) |
| Operation |
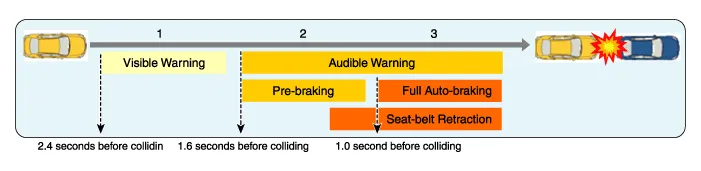
| |
Components components and components location AEB system consists of the following systems Device to detect a potential obstacle forward (radar, cameras) Human-Machine Interface (HMI) to warn the driver and change settings Braking device for generating a braking force
Other information:
Hyundai Genesis (DH) 2013-2016 Service Manual: Start/Stop Button Repair procedures
Removal 1. Disconnect the negative(-) battery terminal. 2. Remove the driver crash pad lower panel. (Refer to Body - "Crash Pad Lower Panel") 3. Remove the start/stop button (A) from the center fascia garnish after loosening the mounting clip.
Hyundai Genesis (DH) 2013-2016 Service Manual: Temperature Control Actuator Repair procedures
Inspection 1. Turn the ignition switch OFF. 2. Disconnect the temperature control actuator connector. 3. Verify that the temperature control actuator operates to the warm (Driver's side) or cool (Passenger's side) position when connecting 12V to terminal 3 and grounding terminal 4.
Categories
- Manuals Home
- Hyundai Genesis Owners Manual
- Hyundai Genesis Service Manual
- Brake System
- Description and Operation
- Electric Parking Brake (EPB) Repair procedures
- New on site
- Most important about car
