Hyundai Genesis (DH): ECS(Electronic Control Suspension) System / Description and Operation
| Description |


| Item | Shape | Function |
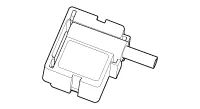
| body G-sensor |
| Body motion detection Sky hook damping control(pitch, bounce control) |
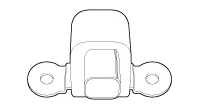
| Wheel G-sensor |
| Wheel roughness detection Damper velocity estimation |
| Vehicle Signals | Vehicle Speed Throttle position sensor Brake Steering Angle Drive mode switch signal | |
| Steering angle sensor |
| Estimation Of The Driver's Steering Left/Right acceleration measurements |


| Operation |
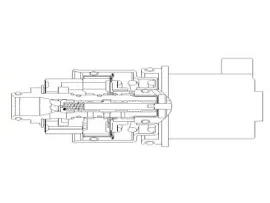
Components 1. ECU2. Front Continuously Variable Damper3. Wheel G-Sensors4. Rear Continuously Variable Damper5. Body G-Sensors Components Location ECS-ECU Body G-Sensors [Right Front] [Left Front] [Right Rear] Wheel G-Sensors [2EA] Front Continuously Variable Damper [2EA] Rear Continuously Variable Damper [2EA]
Schematic Diagrams 1. Connector input/output No.DescriptionPin No.Description1Battery(+)20-2Solenoid RL (+)21-3Solenoid RR (+)22-4Solenoid FL (+)23-5Solenoid FR (+)24-6- 25G- sensor power7- 26Body G-sensor signal RR8- 27Body G-sensor signal FL9- 28Wheel G-sensor signal FR10- 29Wheel G-sensor signal FL11- 30Wheel G-sensor signal FR12- 31CAN HIGH 13Ground32-14Solenoid RL (-) 33CAN LOW 15Solenoid RR (-)34-16Solenoid FL (-)35-17Solenoid FR (-)36IGN (+) 18-37-19-38G-Sensor Ground 2.
Other information:
Hyundai Genesis (DH) 2013-2016 Service Manual: Receiver-Drier Repair procedures
Replacement 1. Remove the condenser. 2. Remove the cap (B) on the bottom of the condenser with the L wrench (A). Tightening torque : 9.81 ~ 14.71 N.m (1.0 ~ 1.5 kgf.m, 7.2 ~ 10.8 lb-ft) 3. Remove the receiver-drier (A) from condenser using a long nose plier.
Hyundai Genesis (DH) 2013-2016 Service Manual: Auto Defogging Sensor Repair procedures
R
Categories
- Manuals Home
- Hyundai Genesis Owners Manual
- Hyundai Genesis Service Manual
- Brake System
- Smart Cruise Control Unit Repair procedures
- Body Electrical System
- New on site
- Most important about car
