Hyundai Genesis (DH): Front / Rear Parking Assist System / Description and Operation
Hyundai Genesis (DH) 2013-2016 Service Manual / Body Electrical System / Front / Rear Parking Assist System / Description and Operation
| System Overview |
RPAS (Rear Parking Assist System) is an electronic driving
aid that warns the driver to be cautious while parking or driving at low
speed. The sensor uses ultrasonic waves to detect objects within
proximity of the vehicle.
RPAS consists of four RPS sensors which are detecting the
obstacles and transmit the result separated into three warning levels,
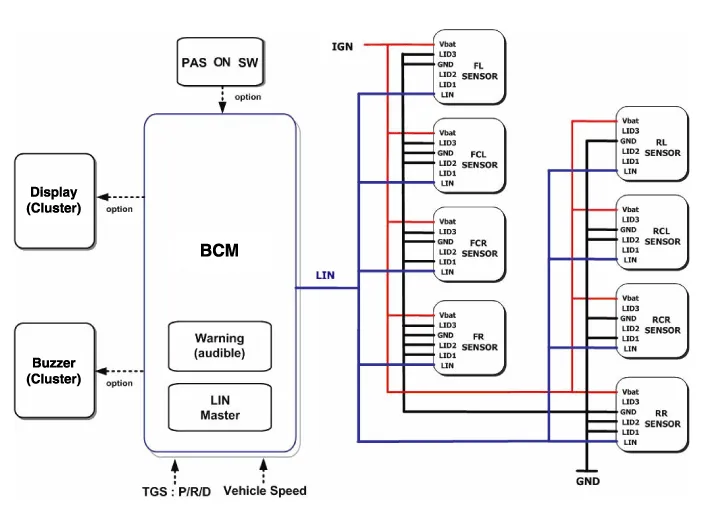
the first, second and third to BCM by Lin communication. BCM decides the
alarm level by the transmitted communication message from the slave
sensors, and then operates the buzzer or transmits the data for display.
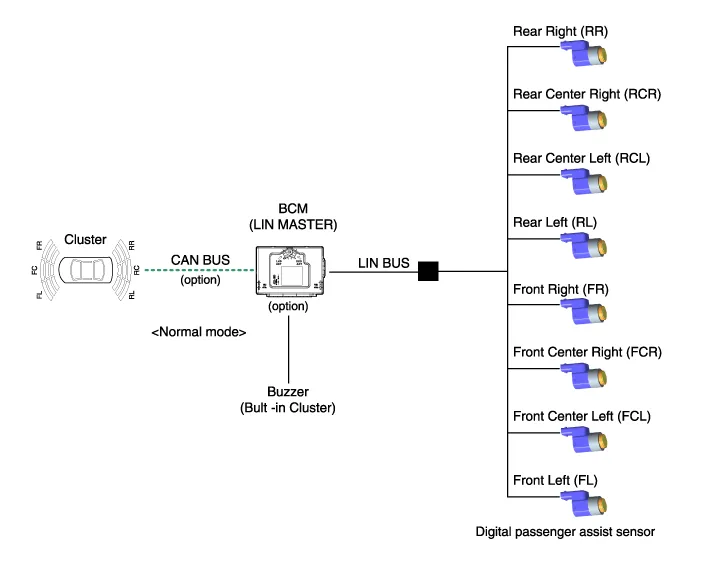
System Block Diagram
System Operation Specification.
| 1. |
INIT mode
Component Location 1. BCM (Body Control Module)2. Ultrasonic sensor Rear parking assist control unit function is built in BCM (body control unit). Other information:Hyundai Genesis (DH) 2013-2016 Service Manual: Components and Components LocationC Hyundai Genesis (DH) 2013-2016 Service Manual: Auto Defogging Actuator Description and OperationDescription The auto defogging sensor is installed on front window glass. The sensor judges and sends signal if moisture occurs to blow out wind for defogging. The air conditioner control module receives a signal from the sensor and restrains moisture and eliminates defog by the intake actuator, A/C, auto defogging actuator, blower motor Categories

Copyright © 2026 www.hgenesisdh.com - 0.0271
|